Avatar Project
A bidirectional tele-operational setup used for shape based manipulation and haptic feedback

Winter 2022-Spring 2022
Goal
Physically create and digitally couple two robots (2 degree of freedoms each) that allows the user to project their presence to the remote environment and allows the user to perceive the displayed environment.
An Interface robot that a user interacts with and Avatar robot that interacts with the environment.
Required Parameters
Horizontal Degree of Freedom:
-
200mm/s speed
-
2-6 Hz bandwidth motion
-
30cm range
-
5N transient forces
-
2N continuous forces
Vertical Degree of Freedom:
-
150mm/s speed
-
225Hz bandwidth motion
-
2-4 cm range
-
10N normal forces
-
2N continuous forces
Inertia is under 500g
"Feels like there's nothing"
Final Product
Me and a team of 5 others created a double capstan driven radial robot setup. The end-effector of the robot is interchangeable to become the interface or avatar robot.



Being a part of the mechanical team, I was in charge of designing and manufacturing the horizontal axis to allow for the transfer of the smooth horizontal movement from the end-effector to the motor. Most importantly, I created the central hub section of the robot. This section not only to unites the horizontal and vertical axis, but also act as a housing for angular contact bearings enabling the smooth force transfers from user's hand to motor. Additionally, I contributed to the discussions about the control systems for the teleoperation. This kickstarted my interest in teleoperations and I currently use this setup to conduct my research which you can learn more about here.
My Contributions
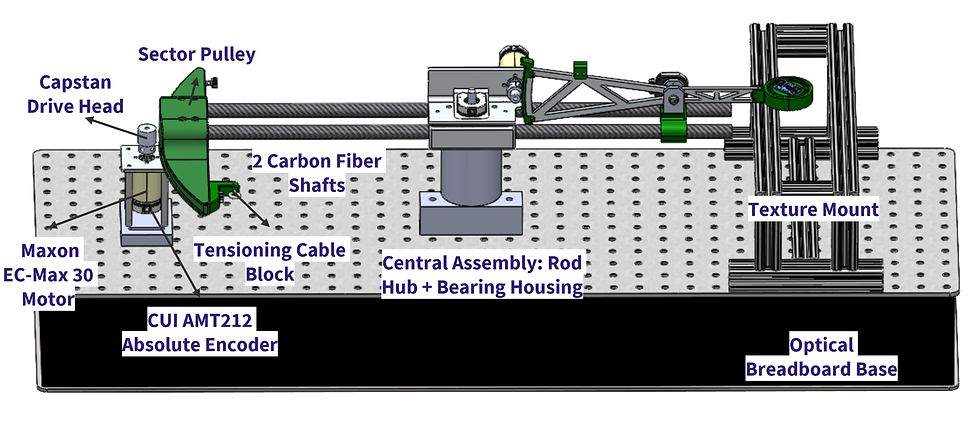

The sector pulley converts the motor capstan rotations of 9mm radius to an arc length of 314 mm.

The central hub contains the horizontal bearing housing and the rod hub. The rod hub fixes the carbon fiber rods to the appropriate length and attaches the vertical axis assembly to the horizontal axis assembly. The bearing housing preloads angular contact bearings to allow for extremely smooth movements.
Manufacturing Process

















Design Process
Proof of Concept


Mockup
Prototype Alpha




Prototype Beta
